벽과 벽 사이를 빠르게 오르는 사족보행 로봇이 일본에서 개발됐다. 불규칙하게 무너진 건물 잔해 속에서 요구조자를 찾아내는 탐색 로봇으로 활약할 것으로 기대된다.
일본 도쿄대학교 로봇공학 연구팀은 18일 공식 채널을 통해 수직 벽 사이를 놀라운 속도로 오르는 사족보행 로봇 클라이언(KLEIYN)을 소개했다. 이 로봇은 사족보행로봇 메비우스(MEVIUS)의 오픈소스를 기반으로 제작됐다.
연구팀은 지진 등으로 붕괴된 건물에서 요구조자를 찾거나 동굴 등 유적을 효율적으로 조사할 로봇을 고안해 왔다. 로봇은 적당한 크기에 불규칙한 지형을 능숙하게 오갈 수 있어야 했다. 또한 도구 없이 벽체를 오를 때 유리한 침니 등반(chimney climbing) 성능이 요구됐다.
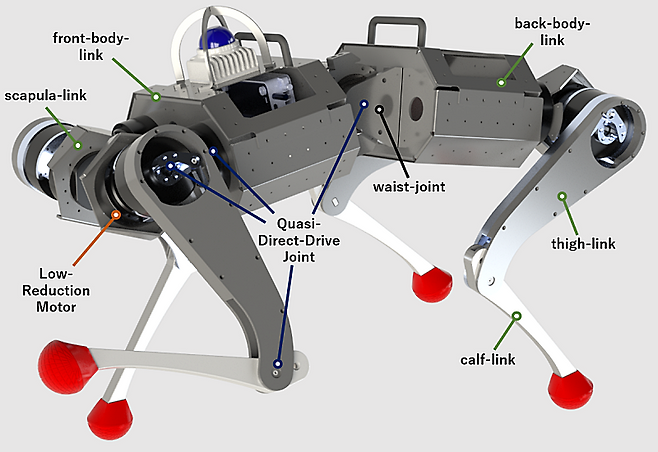
도쿄대 로봇공학자 요네다 케이타 연구원은 “이동 성능이 좋고 자율성까지 겸비한 로봇은 물자 운송이나 미지의 장소 탐험, 재난현장 탐색 등 인간은 어려운 작업이 가능하다”며 “길이 76㎝, 무게 18㎏인 클라이언은 관절 각 3개를 갖춘 네 다리로 신속하게 움직인다”고 전했다.
이어 “클라이언은 허리 관절을 이용해 몸통을 앞뒤로 유연하게 구부릴 수 있다”며 “총 13개의 관절을 이용해 진짜 생물과 같은 복잡한 움직임을 구현, 불규칙한 지형에도 능동적으로 대응한다”고 덧붙였다.
연구팀은 클라이언의 움직임을 제어하기 위해 물리 시뮬레이터로 구축한 가상공간에서 반복 강화학습을 실시했다. 이후 로봇의 행동방식을 결정하는 비대칭 액터 크리틱(asymmetric actor-critic) 학습을 더해 현실 운용이 가능한지 검증했다.
완성된 클라이언은 80~100㎝ 간격의 벽과 벽 틈을 초속 15~17㎝의 속도로 올랐다. 지금까지 이 부문에서 최고 속도를 낸 로봇 실비아(SILVIA) 보다 최대 50배나 빨랐다.
더욱이 클라이언은 거친 지형이나 단차가 많은 구조물도 안정감 있게 통과했고, 만에 하나 미끄러져도 자력으로 자세를 바로잡았다. 다만, 벽의 틈이 1.05m 이상이 되면 토크 부족으로 오를 수 없었다. 장시간 등반하면 모터가 과열됐다.
요네다 케이타 연구원은 “실험 결과 노출된 결점 몇 가지를 보완하면 클라이언은 장시간 무리 없이 재난 현장에서 요구조자를 빠르게 찾아낼 것”이라며 “기존 세계기록을 50배나 끌어올린 성능은 개발한 우리로서도 놀라운 수준”이라고 자평했다.
정이안 기자 anglee@sputnik.kr






























댓글0